Case Materials
Case Navigation
Therac-25 Case
General
Teaching Tools
Case Materials
The material on this page is reprinted from N.G. Leveson, & C.S. Turner. "An Investigation of the Therac-25 Accidents." Computer, Vol. 26, No. 7, July 1993, pp. 18-41. Copyright © 1993 Institute of Electrical and Electronics Engineers. This material is posted here with permission of IEEE. Such permission of the IEEE does not in any way imply IEEE endorsement of any of St. Olaf College's products or services. Internal or personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promotional purposes or for creating new collective works for resale or redistribution must be obtained from the IEEE by sending a blank email message to pubs-permissions@ieee.org. By choosing to view this document, you agree to all provisions of the copyright laws protecting it.
Therac-25: Tyler, TX Software Problem
A lesson to be learned from the Therac-25 story is that focusing on particular software bugs is not the way to make a safe system. Virtually all complex software can be made to behave in an unexpected fashion under certain conditions. The basic mistakes here involved poor software-engineering practices and building a machine that relies on the software for safe operation.
Furthermore, the particular coding error is not as important as the general unsafe design of the software overall. Examining the part of the code blamed for the Tyler accidents is instructive, however, in showing the overall software design flaws. The following explanation of the problem is from the description CMC provided for the FDA, although we have tried to clarify it somewhat. The description leaves some unanswered questions, but it is the best we can do with the information we have.
As described in the sidebar on Therac-25 development and design, the treatment monitor task (Treat) controls the various phases of treatment by executing its eight subroutines (see Figure 2). The treatment phase indicator variable (Tphase) is used to determine which subroutine should be executed. Following the execution of a particular subroutine, Treat reschedules itself.
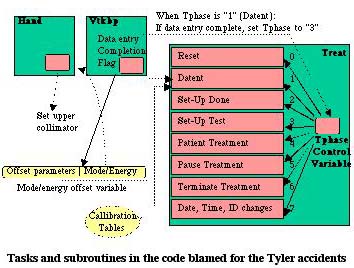
Figure 2
One of Treat’s subroutines, called Datent (data entry), communicates with the keyboard handler task (a task that runs concurrently with Treat) via a shared variable (Data-entry completion flag) to determine whether the prescription data has been entered. The keyboard handler recognizes the completion of data entry and changes the Data-entry completion variable to denote this. Once the Data-entry completion variable is set, the Datent subroutine detects the variable’s change in status and changes the value of Tphase from 1 (Data Entry) to 3 (Set-Up Test).
In this case, the Datent subroutine exits back to the Treat subroutine, which will reschedule itself and begin execution of the Set-Up Test subroutine. If the Data-entry completion variable has not been set, Datent leaves the value of Tphase unchanged and exits back to Treat’s main line. Treat will then reschedule itself, essentially rescheduling the Datent subroutine.
The command line at the lower right corner of the screen is the cursor’s normal position when the operator has completed all necessary changes to the prescription. Prescription editing is signified by cursor movement off the command line. As the program was originally designed, the Data-entry completion variable by itself is not sufficient since it does not ensure that the cursor is located on the command line. Under the right circumstances, the data-entry phase can be exited before all edit changes are made on the screen.
The keyboard handler parses the mode and energy level specified by the operator and places an encoded result in another shared variable, the 2-byte mode/energy offset (MEOS) variable. The low-order byte of this variable is used by another task (Hand) to set the collimator/turntable to the proper position for the selected mode/energy. The high-order byte of the MEOS variable is used by Datent to set several operating parameters.
Initially, the data-entry process forces the operator to enter the mode and energy, except when the operator selects the photon mode, in which case the energy defaults to 25 MeV. The operator can later edit the mode and energy separately. If the keyboard handler sets the data-entry completion variable before the operator changes the data in MEOS, Datent will not detect the changes in MEOS since it has already exited and will not be reentered again. The upper collimator, on the other hand, is set to the position dictated by the low-order byte of MEOS by another concurrently running task (Hand) and can therefore be inconsistent with the parameters set in accordance with the information in the high-order byte of MEOS. The software appears to include no checks to detect such an incompatibility.
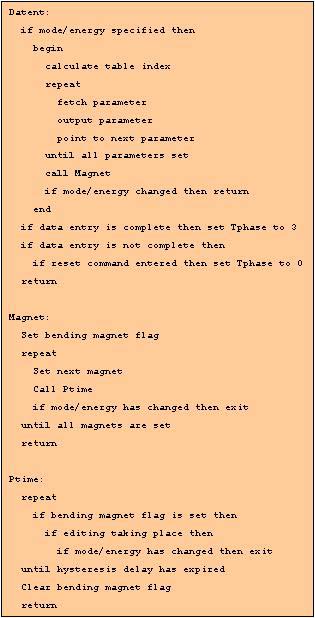
Figure 3. Datent, Magnet, and Ptime subroutines
The first thing that Datent does when it is entered is to check whether the mode/energy has been set in MEOS. If so, it uses the high-order byte to index into a table of preset operating parameters and places them in the digital-to-analog output table. The contents of this output table are transferred to the digital-analog converter during the next clock cycle. Once the parameters are all set, Datent calls the subroutine Magnet, which sets the bending magnets. Figure 3 is a simplified pseudocode description of relevant parts of the software.
Setting the bending magnets takes about 8 seconds. Magnet calls a subroutine called Ptime to introduce a time delay. Since several magnets need to be set, Ptime is entered and exited several times. A flag to indicate that bending magnets are being set is initialized upon entry to the Magnet subroutine and cleared at the end of Ptime. Furthermore, Ptime checks a shared variable, set by the keyboard handler, that indicates the presence of any editing requests. If there are edits, then Ptime clears the bending magnet variable and exits to Magnet, which then exits to Datent. But the edit change variable is checked by Ptime only if the bending magnet flag is set. Since Ptime clears it during its first execution, any edits performed during each succeeding pass through Ptime will not be recognized. Thus, an edit change of the mode or energy, although reflected on the operator’s screen and the mode/energy offset variable, will not be sensed by Datent so it can index the appropriate calibration tables for the machine parameters.
Recall that the Tyler error occurred when the operator made an entry indicating the mode/energy, went to the command line, then moved the cursor up to change the mode/energy, and returned to the command line all within 8 seconds. Since the magnet setting takes about 8 seconds and Magnet does not recognize edits after the first execution of Ptime, the editing had been completed by the return to Datent, which never detected that it had occurred. Part of the problem was fixed after the accident by clearing the bending-magnet variable at the end of Magnet (after all the magnets have been set) instead of at the end of Ptime.
But this was not the only problem. Upon exit from the Magnet subroutine, the data-entry subroutine (Datent) checks the data-entry completion variable. If it indicates that data entry is complete, Datent sets Tphase to 3 and Datent is not entered again. If it is not set, Datent leaves Tphase unchanged, which means it will eventually be rescheduled. But the data-entry completion variable only indicates that the cursor has been down to the command line, not that it is still there. A potential race condition is set up. To fix this, CMC introduced another shared variable controlled by the keyboard handler task that indicates the cursor is not positioned on the command line. If this variable is set, then prescription entry is still in progress and the value of Tphase is left unchanged.